Using drones to support forest management and clean-up efforts
16 Dec 2024
Our Proof of Concept (PoC) for drone-assisted forest management leverages a semi-automated drone system designed to help forest management authorities efficiently scan large areas for rubbish and other potential hazards. Each ranger stationed in a specific sector deploys the drone to follow a pre-programmed flight path that scans the area and captures images.
The concept overview
Picture a forest authority manager responsible for monitoring a specific sector of an expansive forest or park. Their work is often supported by rangers and drones that patrol designated forest sectors.
Rangers deploy drones that gather data by taking images of the area from a particular altitude. This way, the operator has a clear, real-time view of each drone’s activity through a dynamic dashboard interface. They watch as drones gather images, flagging anomalies on the ground, from trash to suspicious objects. As each drone scans its area, it attempts to classify findings independently. When it spots a familiar item, like a pile of rubbish, the system automatically tags it for cleanup, ready to be assigned to a ranger.
But not every encounter is straightforward. The system instantly alerts the operator when the AI identifies an unfamiliar or potentially dangerous item, like discarded car batteries or chemical containers. With access to FPV (a first-person view) footage, high-resolution images, and even infrared data, the operator assesses the situation, deciding on the appropriate response.
For instance, if the threat is severe, the operator can dispatch a ranger to the precise coordinates for rapid intervention. Or, if more information is needed, they can guide the drone closer for a better view, maximizing the chances of correct identification and minimizing environmental impact.
Here’s a detailed description of this proof of concept:
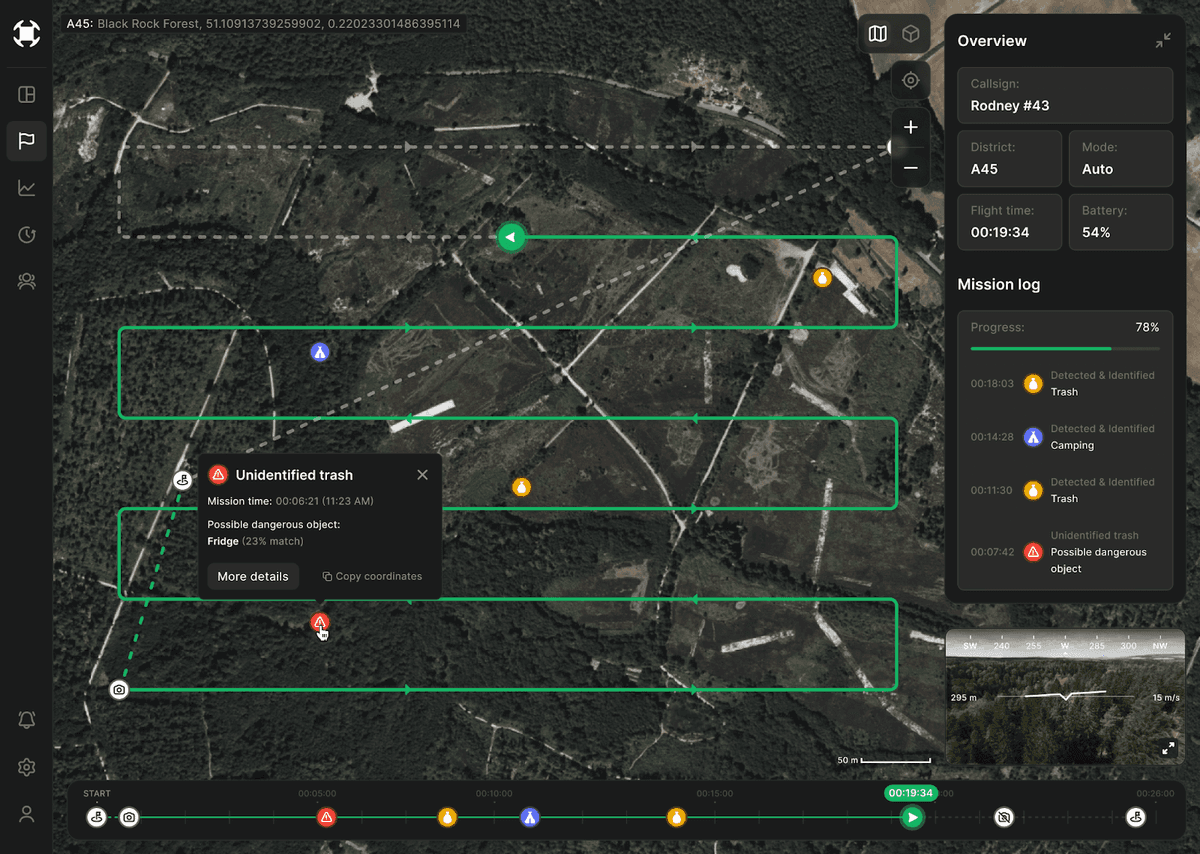
The screenshot above shows a detailed mission overview from the drone system's dashboard. It includes several key components:
- A map view displaying the drone's flight path, indicated by solid green lines. Each segment of the path shows where the drone has traveled and what it has detected.
- Markers highlight different findings: trash, a camping site, and a potentially dangerous object. These markers are color-coded and correspond to entries in the mission log.
- The right-hand panel provides an overview of the mission, including: Callsign of the drone operator (Rodney #43), the district being monitored (A45), the current flight mode (Auto), flight time, and remaining battery.
- Mission log detailing the progress (78%) and timestamped events, including detections of trash, a campsite, and a potentially dangerous object.
- The lower part of the interface features a timeline showing when each detection occurred, matched with icons indicating the type of finding.
- The First Person View (FPV) camera feed from the drone is shown in the bottom right corner, providing a live visual of the forest, along with compass data, altitude, and speed.
When the drone encounters an unidentified or potentially dangerous object (such as chemical waste), the central operator must step in to make critical decisions. For example, the operator can dispatch a ranger to investigate further or direct the drone to perform additional scans from different angles or altitudes.
This screen above highlights a critical moment in the mission. The drone has detected a potentially hazardous object, requiring the operator's decision-making for further action. The system has flagged the object as a possible refrigerator, though the match percentage indicates uncertainty, prompting further analysis or intervention.
A pop-up window in the center of the screen provides more information about an unidentified object labeled as "Unidentified trash." The details include:
Mission time: 00:06:21 (11:23 AM), indicating when the object was detected.
Possible dangerous object: The system has identified the object as a potential refrigerator with a 23% match, suggesting uncertainty in the AI's analysis.
The option for "More details" or to copy the coordinates is available, which allows further investigation or action.
On the right-hand side is the mission overview panel, which provides the same data as before, such as the drone operator's callsign (Rodney #43), the district (A45), flight mode (Auto), flight time (00:19:34), and battery level (54%).
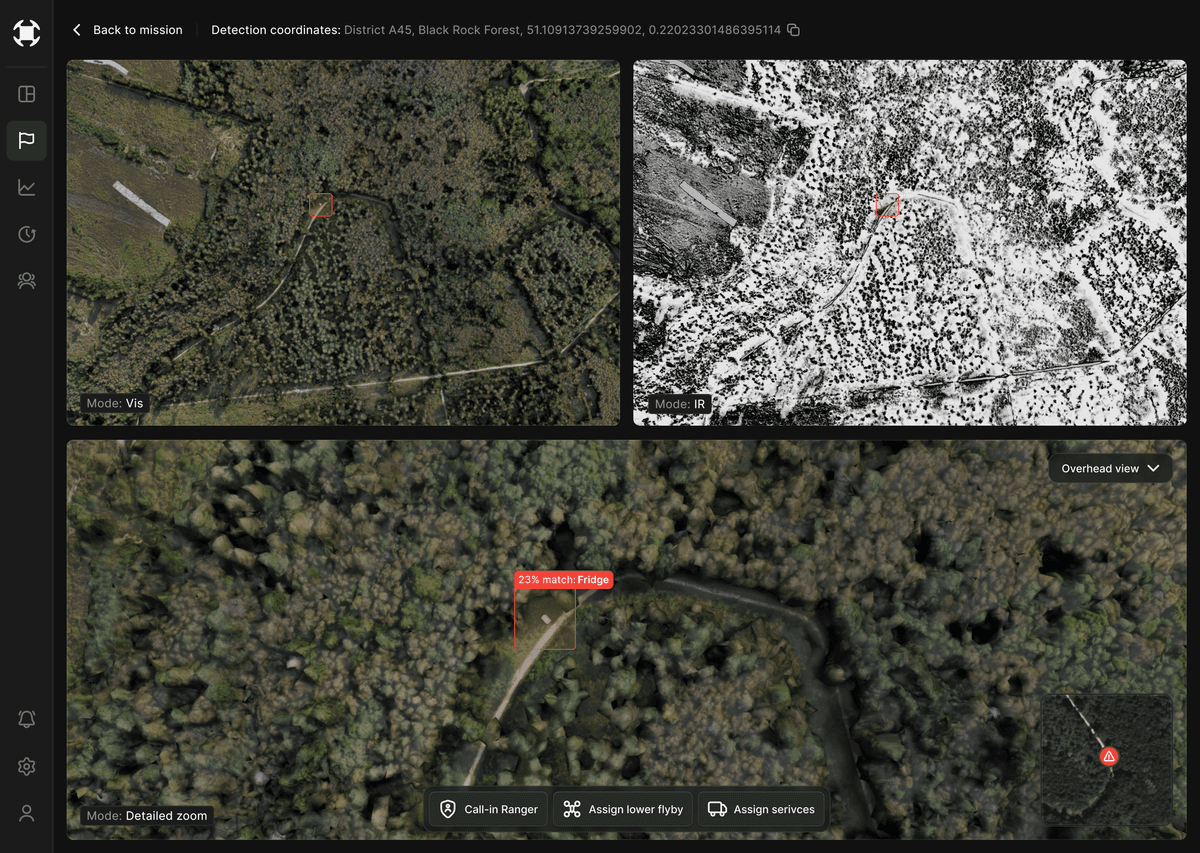
This screen provides a detailed investigation of a specific detection during the drone's mission. It presents multiple views and modes to analyze the unidentified object, with a focus on visual and infrared (IR) imagery alongside actionable decisions for the operator.
Breakdown of the screen:
Top-left panel
Displays a standard visual mode (Mode: Vis) of the area, showing a top-down view of the forested location where the object is found. The object is marked with a red square, highlighting the area of interest.
Top-right panel
Displays the infrared (IR) mode, useful for detecting temperature differences or for scanning in low-light conditions. The same object is marked with a red square here as well, but the IR imaging offers a different perspective, especially if the object is emitting heat or is thermally distinct from its surroundings.
Bottom panel
A detailed zoom mode gives a close-up aerial view of the area. The system flags the object with a red label reading "23% match: Fridge," again indicating that the AI suspects it might be a refrigerator, although with a low confidence match. This view allows for more detailed analysis of the surrounding terrain and object placement.
Action buttons at the bottom:
- Call-in ranger: The operator can summon a ranger to physically inspect the object on-site.
- Assign lower flyby: This option suggests a follow-up mission where the drone can fly at a lower altitude to capture more detailed images of the object.
- Assign services: This could involve dispatching cleanup crews or other specialized services if the object requires immediate attention, such as handling hazardous waste.
The interface lays out automated insights from the droneI and multiple viewing modes, offering the operator a holistic view of the situation. The actionable buttons allow immediate response based on the data, whether that involves sending a ranger, conducting further analysis, or assigning necessary services.
The entire proof of concept shows potential in enhancing the effectiveness of forest management efforts. With the ability to automate patrols, record and analyze findings, and make real-time decisions, drones offer an exciting future for conservation and public land management.
Are you interested in more of our work? Check out our latest case studies.